JR6PUE HOME PAGE
JR6PUE HOME PAGE
FTM-400D用に新たなGPSモジュールを見つけました
FTM-400Dの内部GPSモジュールは、冷機起動時に捕捉が遅いという不満があります。
FTM-400Dは、GPSモジュールと4800bpsで通信します。しかしながら、秋月電子で販売されている
GPSモジュールは、4800bpsに対応するものがすでに無くなっており(ないこともないのですがきわめて玄人向き)
外部GPSモジュールを作れない状況でした。
JE6JVD局から該当しそうなモジュールを見つけたとの連絡をいただいたので、入手して制作してみました。
Alibabaという海外サイトですが2週間くらいで手元に届きました。
当初購入したのは、NEO-6M RS232Cでした。制作方法は、以前、制作した時の接続方法と同じです。
しかしながら、電源をOFFしてしばらくすると9600bpsに戻る。さらに、FTM-400DのGPS衛星表示が消える。
などの不具合が出ました。
最終的に、電源をOFFすると9600bpsに戻るのはどうも付属している電池が切れているようでしたので、
外付けで3VのCR2032電池を付けて解決しました。みかけは不恰好ですが電池ホルダーを接続して
自己融着テープを巻いて絶縁対策をとりました。
GPS衛星表示も設定で、ほぼ解決できましたが詳細は後段で紹介します。

こんなことをして遊んでいた時に、Q-net(APRS利用者)メンバーの忘年会がありFTM-400Dの内蔵GPSの補足時間の
遅さが話題になりましたので、使えるモジュールがありますよとアナウンスしたところ4名の方がほしいという事
でしたので追加購入することにしました。
NEO-6Mを購入したサイトを見ているとチップは同じですが周辺部が違うBS-280を見つけました。

早速注文。2週間して手元に届きました。

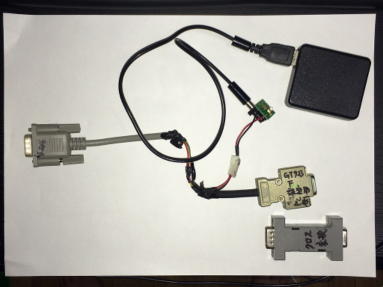
これを使って、PCとモジュールを接続。PCと接続は、クロスケーブルを利用します。
ここを参考に下記部品を以前製作していましたのでこれを利用しました。
ようは、5Vをモジュールに供給しながらPCとクロスケーブルで接続するという事です。
一番右下にあるのは、RS232Cケーブルがストレートしかなかったので、クロスに変換できる
ように追加したものです。
設定プログラムは、ここにあります。
u-center for Windows v19.05
設定プログラムを起動してボーレート変更等はこのマニュアルをご覧ください。
さらに、この辺も参考に。
プログラムが起動したらPCに接続してあるCOMを選択し9600bpsで接続します。
起動したらviewのところから“configuration view”を開きます。
下記を参考に、ボーレートを4800へ変更します。
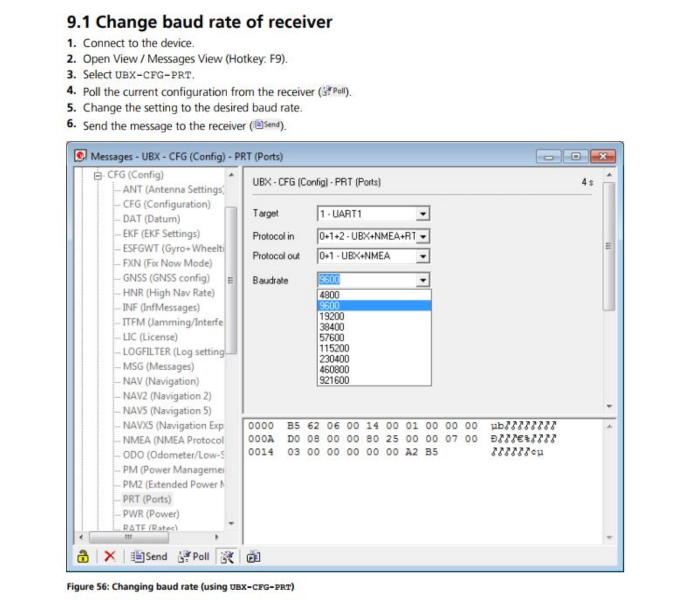
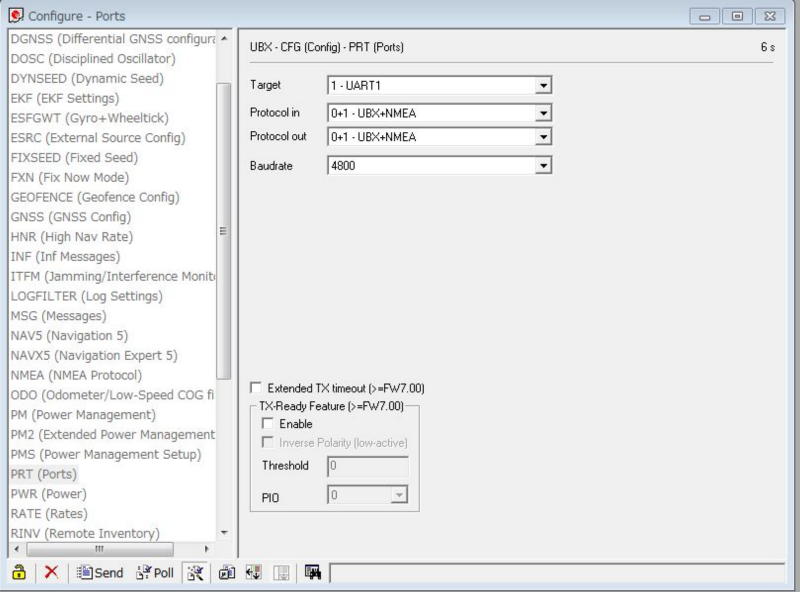
PRT(ports)を選択
IN OUTとも、UBX+NMEAを選択。
Baudrate 4800
左下のsendを押す。
一度、接続を切って4800で再接続します。
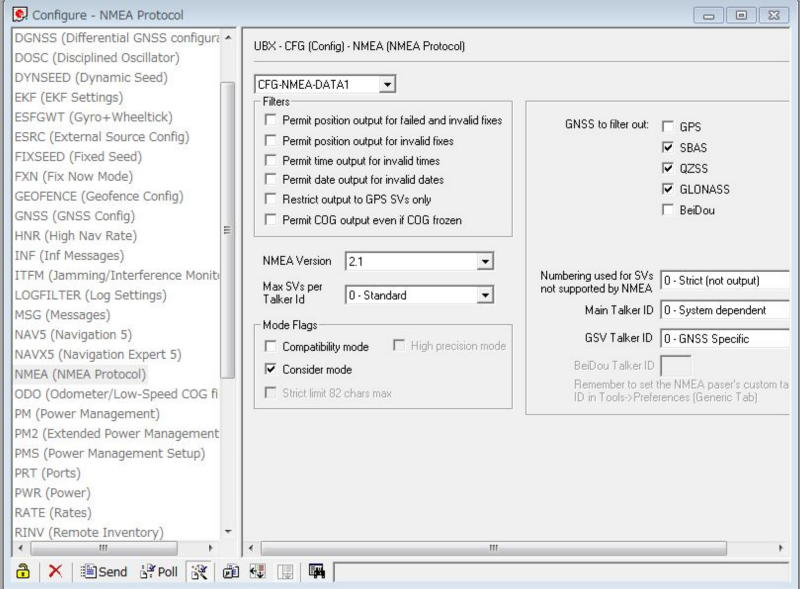
次に、NMEA(NMEA Protocol) を選択
NMEA Version 2.1
GPS信号以外は出力しないように、GNSS to filter out
SBAS
QZSS
GLONASS
をチェック
左下のSend をクリック
簡単に書いていますが、実は、この設定を見つけるのに相当苦労しました。(^^;
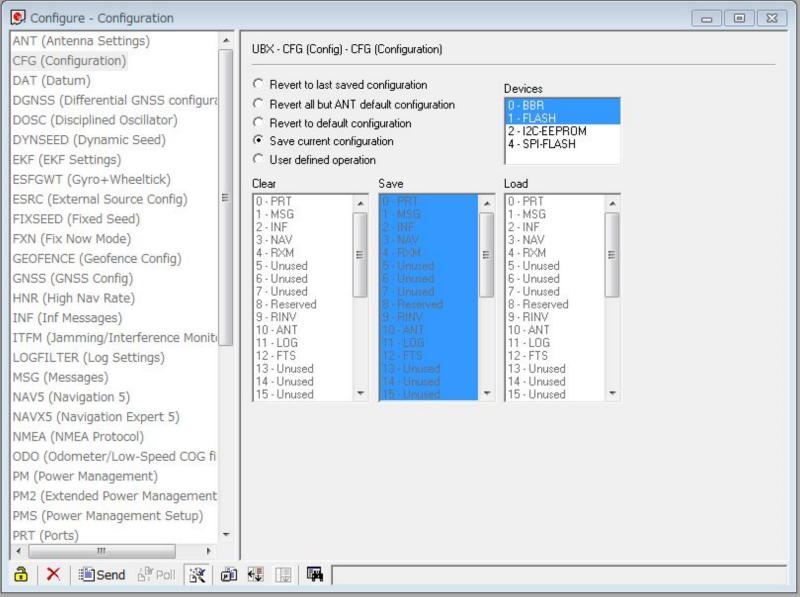
設定した内容が電源をおとしても消えないようにフラッシュメモリーに書き込みます。
CFG(Configuration)
Save current confiuration
Device
0-BBR
1-FLASH
設定が保存できない時は、
新しい機種になると上記フラッシュメモリーではないかもしれません。
2-I2C-EEPROM
4-SPI-FLASH
も,
SENDを押して書き込みしてみてください。(^^;
左下のSendを押す
これで、設定は終わります。
モジュールを組み込みます。
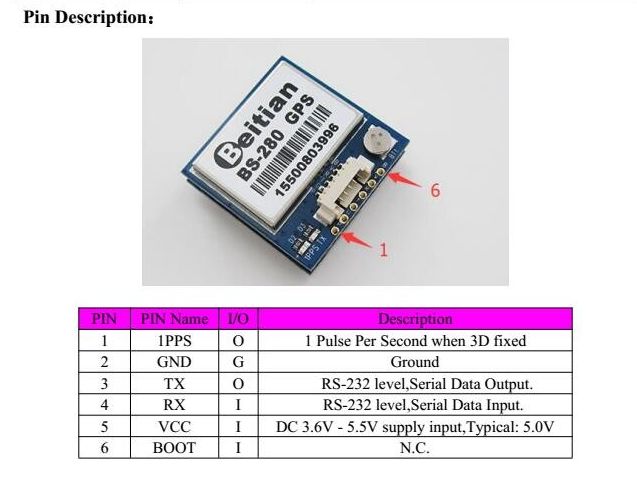
接続方法は、以前紹介した方法と同じです。
2番から5番までのPINを使います。
GPSモジュールの動作電源は、DC3.6Vから5.5Vです。
以前も紹介していますが、車のシガライターに差してスマートホンが充電できる
部品を利用してUSB電源として取り出します。この方法が一番簡単です。
下記は、今回頼まれて制作した4台です。


良い感じで表示しています。
これまで、衛星の捕捉状況が消える現象が発生していたのは、GPS以外にも
SBAS、QZSS、GLONASSなどの信号も受信し、出力していたので表示プログラムが
トラブルをおこしていたと思われます。
消える状況は、以前にくらべれば格段に減りましたがたまに消える現象が発生します。
信号自体は、受信していますのでaprsの機能自体は問題ないのですが衛星表示機能も
100%にしたいです。
これは、FTM-400本体のプログラム関係が原因となっているのかもしれません。
それでも、GPSモジュールのフィルター機能を利用し、GPS信号しか出力しないようにしたのと
NMEAのバージョンをデフォルトの2.3から2.1に落としたことが良い結果につながっていると思われます。(2018.1.6)
